Wintec Dynamicsの躍進:スマートパワー時代へようこそ
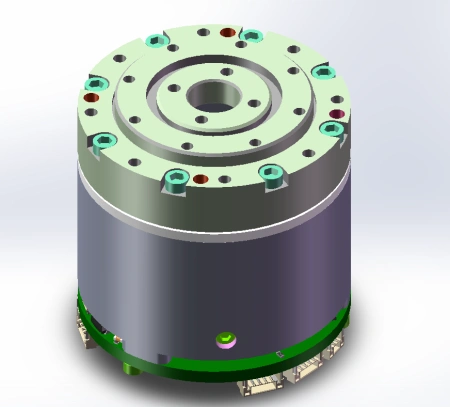
関節モジュールはロボットの中核であり、すべての部品を接続して柔軟な動作と運動制御を実現します。継続的なイノベーションと突破により、ロボット業界における2つの長年の課題を解決しました。理想的な関節モジュールはロボットアームの多軸接続を実現し、ヒューマノイドロボットが回転、持ち上げ、多方向の曲げなど人間のような動作を行えるようにします。そのため、コンパクト、軽量、高トルク、高精度の関節モジュールはロボットの価値の中核です。
業界の課題1:モジュール仕様が多すぎる
現在、ロボットアームには少なくとも7つの関節モジュールが必要で、各モジュールのトルク要件は異なります。手首から肩にかけてモジュールサイズが大きくなり、異なるトルクニーズに対応します。各モジュールは個別に設計・製造する必要があり、製品の種類と仕様が多岐にわたり、リソースの無駄や生産管理の複雑化を招いています。これにより関節モジュールのコストが高騰し、ヒューマノイドロボット実現の主要な障壁となっています。
この問題を根本から解決するため、Wintecのエンジニアリングチームは広範な研究と実証実験を行い、革新的な減速機とモーターの組み合わせを大胆に提案しました。このソリューションが広く採用されれば、技術革新と構造最適化を促進し、ロボット産業に新たな影響と変革をもたらすことが期待されます。
1. 革新的ソリューション:モジュール仕様の削減
これがロボット産業の新たな変革を推進します。
ロボット関節モジュールの一般的なサイズ範囲は50mmから140mmです。繰り返しの研究と実践検証を経て、Wintecは革新的な減速機とモーターの組み合わせを提案しました:
01 52mm径で50mmと60mmを代替。
02 70mm径で70mmと80mmを代替。
03 108mmで110mmと120mm径を代替。
2. 構造最適化:完璧な組み合わせ
構造最適化によりロボットのトルク密度比が大幅に向上しました。主流モジュールと比較して、Wintecの新しい組み合わせモジュールはより小さく、より軽く、よりパワフルで、異なる仕様が同サイズのモジュールを代替できます。
3. Wintec:精密製造
高トルク密度とフラットプロファイルの組み合わせは、サーボモーター製造におけるWintecの4年間の実績を反映しています。
当社の製品は20年以上の先進的な製造管理経験を持っています。共通部品の使用によりモジュール仕様を削減し、調達・在庫コストを効果的に削減、生産コストを管理しています。これは多くのロボットR&D・製造企業のコスト削減と効率向上に大きく貢献し、ロボット産業発展の重要なマイルストーンとなることが期待されます。
Wintecは精密統合部品の卓越性を追求し続け、輸入障壁の打破に努め、優れたヒューマノイドロボット企業の創出に貢献してまいります。